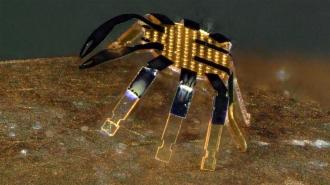
Just fractions of a millimetre across, a new bio-inspired robot can complete a complex range of motions when hit by a sequence of laser pulses. The crab’s structure is far more sophisticated than many existing robots of the same size, but can still be manufactured using a relatively simple process. Its design could open up promising opportunities in research and medicine.
Tiny robots: Robot designs have progressed at a breakneck pace over the past few years. Often inspired by the evolutionary adaptations of animals, many modern robots feature intricate structures, advanced materials, and complex electrical circuits that allow them to perceive their surroundings, communicate with their neighbours, and navigate difficult terrains.
By miniaturising these designs, researchers are hoping to expand these applications to spaces that would be otherwise impossible to reach — including the many passages and chambers found inside our own bodies.
By folding 2D materials in just the right way, more complex 3D structures can emerge.
The challenge: With most existing manufacturing techniques, it isn’t yet possible to recreate the complexity of larger-scale robots in sub-millimetre bots. This has mostly limited tiny robots to very simple structures, like spheres, rods, and tubes.
There is an exception: by folding 2D materials in just the right way, more complex 3D structures can emerge – much like the paper in a pop-up book.
So far, these designs have demonstrated an ability to swim through liquid, but still aren’t able to walk across flat, solid surfaces.
The design: A team of researchers in China and the US, headed by John Rogers at Northwestern University, have now overcome this challenge with a new robot design, inspired by the peekytoe crab.
To build their robot, the team printed its components onto a flat surface, then transferred them onto a piece of stretched silicone.
This initial “2D” print contained a rigid skeleton, featuring a central body and six legs, connected by joints made from a deformable material.
Using this same joint material, the team attached two claws and a pair of back legs to the central body. They also used sticky pads to bond the feet and claws to the silicone surface.
When they relaxed the stretched silicone, the joints buckled under the compressive stress, and the structure popped up into a 3D, free-standing structure: a crab robot.
At this point, Rogers’ team coated the entire crab in a thin glass shell. This kept the joint material in its new shape, even after the robot was removed from the unstretched silicone.
With this technique, the researchers fabricated a robot measuring just around 200 micrometres across. At roughly 1/150th a peekytoe crab’s actual size, their design was small enough to stand on the edge of a coin.
Programming movement: When heated by a laser, the crab’s joint material reverted back to its original 2D shape, allowing the robot to straighten its legs and claws. Yet as it cooled, the glass shell forced this material back into its bent state.
This behaviour allowed Rogers’ team to stimulate a wide range of motions in their crab: by heating its entire body with laser pulses, the structure could bend, twist, and expand. By targeting specific sets of joints in pre-programmed sequences of laser pulses, the robot could be instructed to crawl, run, turn, and jump.
Unlike previous designs of sub-millimetre robots, the crab’s minuscule size worked to its advantage. After heating and straightening, the joint material took very little time to cool down and bend – allowing the robot’s legs and claws to quickly move through their full range of motion.
The crab has a sensing capability that allows its users to gain useful information about the robot’s surroundings.
Altogether, this allowed the crab to move at speeds of close to half its body length per second – substantially higher than existing sub-millimetre robots.
To improve their design further, Rogers and colleagues gave their crab a pair of “eyes” made from a retroreflector material – which directs incoming light back towards its source. This provided a simple wireless system for the team to monitor and locate their robot.
In addition, they coated these retroreflectors with a material that absorbs particular wavelengths of light, which vary with the humidity of the surrounding air. This added a sensing capability to the robot – allowing its users to gain useful information about its surroundings.
Performing delicate tasks: Already, the capabilities of the team’s robot present promising opportunities in a wide array of tasks.
For biologists, such a design could be an ideal vehicle for manipulating tissues, or even carrying individual cells: completing programmed manoeuvres that would be far too delicate for larger-scale robots to handle.
Elsewhere, tiny robots could be programmed to deliver drugs to targeted sites inside the body, or help doctors to perform minimally invasive surgical procedures.
By adapting their approach, Rogers and colleagues ultimately hope to fabricate sub-millimetre robots spanning a diverse range of shapes and sizes in the future – expanding the scope of their potential uses even further.
We’d love to hear from you! If you have a comment about this article or if you have a tip for a future Freethink story, please email us at [email protected].